Could Avian-Inspired Legs Be The Future For Robots?
Robots taking inspiration from avian birds could be beneficial

Credit: Max Planck Institute For Intelligent Systems
The modern ostrich’s’ leg structure is very similar to the Tyrannosaurus Rex that lived 66 million years ago. Through the thousands of years of evolution, bipedal, avian-inspired animals have stood the test of time. The Max Planck Institute for Intelligent Systems has used this technology and made a small scale robot, called the BirdBot.
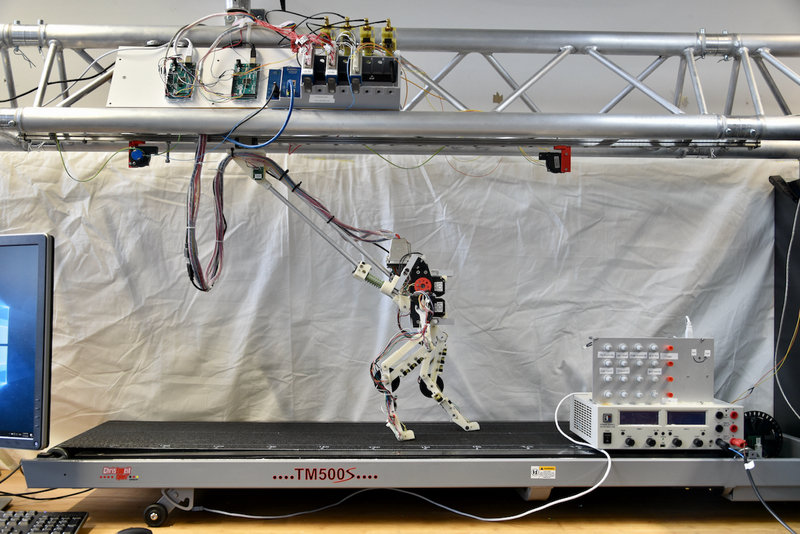
Image Credit: https://dlg.is.mpg.de/news/birdbot-is-energy-efficient-thanks-to-nature-as-a-model
How It Works
The BirdBot has many advantages compared to a traditional robot, like being 300% more efficient. This is acheived by not using dozens of parts, but only using two motors in each leg and one in the torso to control most of the BirdBot. This acts like a network of muscles and tendons that extend across multiple joints. It also uses springs that get compressed in the feet of the BirdBot. Everytime the bot strikes the ground, the compressed spring releases its energy and drives the robot forward. Then, the other leg is pulled towards their bodies and the foot folds back. By using less parts, the BirdBot is easier to scale up without using a lot of energy, not to mention it doesn’t need any pressure or balance sensors to work.
 BirdBot robot as rendered image. Credit: Dynamic Locomotion Group, Max Planck Institute for Intelligent Systems/University of California, Irvine; “BirdBot Achieves Energy-Efficient Gait with Minimal Control Using Avian-Inspired Leg Clutching,” by Alexander Badri-Spröwitz et al., in Science Robotics, Vol. 7, No. 64; March 2022
BirdBot robot as rendered image. Credit: Dynamic Locomotion Group, Max Planck Institute for Intelligent Systems/University of California, Irvine; “BirdBot Achieves Energy-Efficient Gait with Minimal Control Using Avian-Inspired Leg Clutching,” by Alexander Badri-Spröwitz et al., in Science Robotics, Vol. 7, No. 64; March 2022
The Future For Robot Legs
Using avian-inspired legs has many good benefits to it like using a quarter of the amount of energy to do the same task compared to traditional robots, but can only work for a niche group of robots. Currently, it can only move along one plane and is less adaptable, but this could be a needed break for small form robots.
RELATED STORIES:
http://techzle.com/robotic-legs-modeled-on-ratites
https://www.scientificamerican.com/article/birds-make-better-bipedal-bots-than-humans-do/#
https://cyber-valley.de/en/news/birdbot-the-avian-inspired-robot
https://cosmosmagazine.com/technology/robotics/bird-leg-robotics/