Two Months ago, my teammate Emerson and I, Rafan, decided to build a VEX IQ Speed Bot for our engineering project. It was a very fun experience, but we also faced some trouble along the way, which made us have to adapt to changes throughout this journey. It took us many weeks to complete this project, with many changes along the way.
When we started, we were excited to put everything together, but then we realized that it wasn’t going to be a simple task. One of the biggest challenges we faced was that we didn’t have the right length of parts we needed. Because of this, our Speed-Bot ended up being a lot longer than it should have been. We had to make a lot of different changes to fit everything in right. We also decided to use different wheels to make it go faster.
Finding the parts was another challenge. A lot of the time, we had no idea where they were, so we had to look around and search for them, which took a long time. We also added extra batteries to make the speed bot faster than it was, but this also meant we had to make some changes so that the bot wouldn’t get slowed down by the extra weight, and we had to make room on the bot to add the batteries.
At first, our speed bot was very hard to control and move because of its different size and us being new to driving the Vex robots, but we kept tweaking it and practicing driving. After a lot of trial and error, we had to go through to get the speed bot to drive, but eventually we did it, and it was super fast.
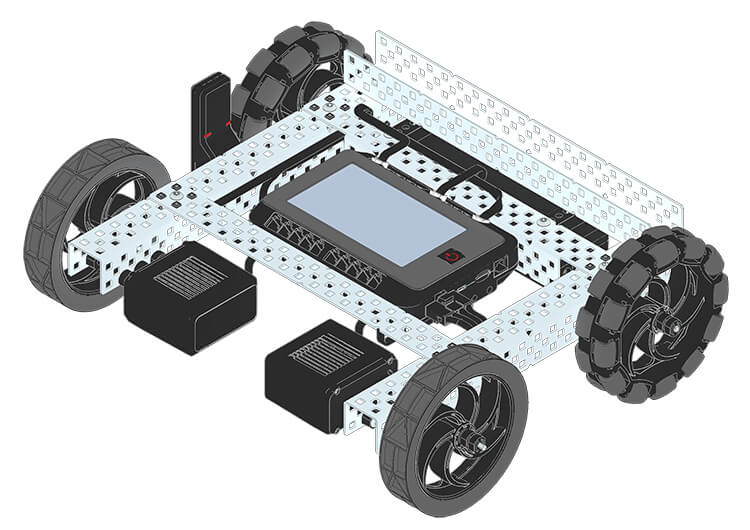
To build our VEX IQ Speed Bot, we had to use a large variety of parts, so here is a list of most of the parts we used. Hex nuts, 16-star drive screws, 2 (32×0.5) locking star drive screws, 2 (32×1.5) locking star drive screws, 2 Smart Motors (11W), 4 (0.375) Nylon spacers, 2 (0.5) Nylon spacers, 8 high-strength gear shaft inserts, 1 V5 Robot Brain, 4 (0x2) connector pins, 2 V5 battery clips, 1 V5 Robot Battery, 1 V5 Robot Radio, 12 rubber shaft collars, 4 Bearing Flats, 4 1-Post Hex Nut Retainer With Bearing Flat, 6 4-Post Hex Nut Retainer, 3 C Channel 1x2x1x15, 2 Angle 2x2x14x20, 2 4 Wheels, 2 4” Omni directional wheels, 2 8x pitch shafts, 2 6x pitch shafts, 1 (180 mm) V5 power cable, 3 (300 mm) V5 smart cables.
In the end, building our VEX IQ Speed Bot was a lot of fun. We faced a lot of problems, but we learned how to solve them. It was a lot of hard work, but seeing all of our hard work and dedication come together made all of it worth it.
RELATED STORIES:
https://content.vexrobotics.com/docs/Speedbot-BI.pdf
https://instructions.online/?id=4063-v5_speed_build
https://www.vexforum.com/t/speed-bot-dragster/74163
https://www.vexforum.com/t/how-to-make-robot-faster/73867
TAKE ACTION:


